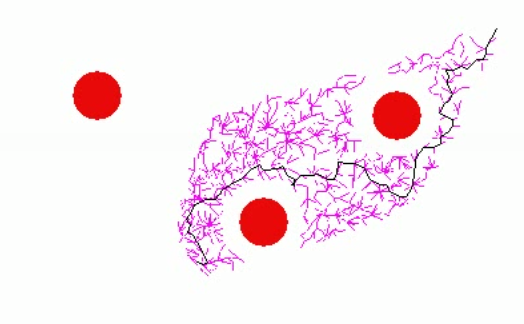
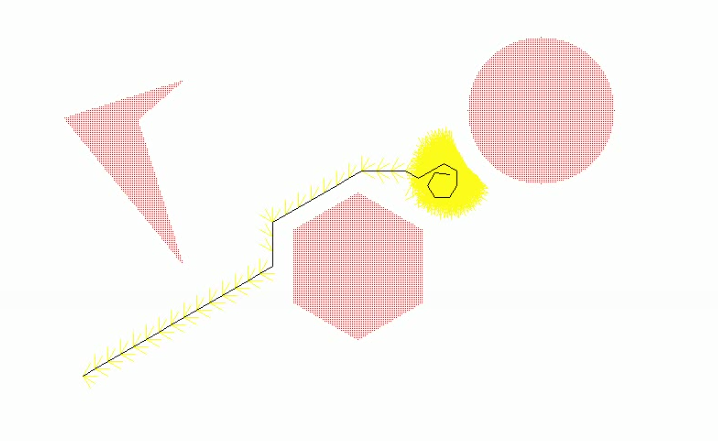
Triangular Geometrized RRT* (TG-RRT*)
Implemented Triangular Geometrised RRT-Star on Turtlebot3 in Gazebo/ROS. This is based on using geometric centres of the triangle formed by start, goal and a random point to reduce dispersion of random samples bringing them towards the triangle.
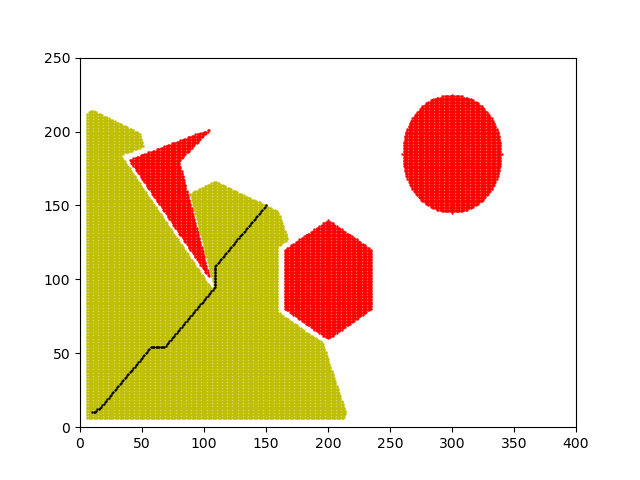
A* on Turtlebot
Implemented A* path planning algorithm for turtlebot 3 on given arena
Dijkstra Algorithm
Implemented Dijkstra Path planning Algorithm for a Point robot
8 Puzzle Problem
Implemented Breadth First Search (BFS) algorithm to find a solution to 8 puzzle problem
Micro mouse simulator Maze solver
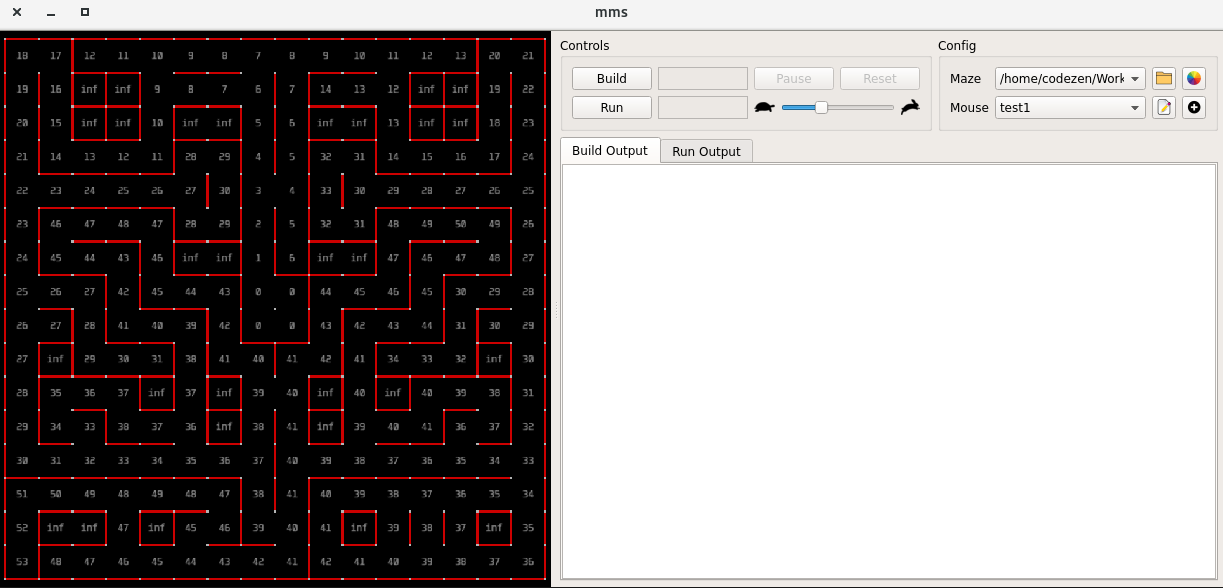
Implemented Depth First Search (DFS) algorithm to solve complex mazes using MicroMouseSimulator (MMS)
MoveIt Panda Robot Pick and Place
Used MoveIt package in ROS to perform a pick and place task using the Panda manipulator